Bár ugyanúgy GPS jelvevő antennák által feldolgozott jelek alapján navigálja a robotpilóta vezérlésén keresztül a kormányzást, viszont itt nem a kormánykerékre szerelt mozgató mechanizmus, (dörzskerék, fogaskoszorú, stb.) végzi el az automatikus korrekciót a kormányberendezésen, hanem a hidrosztatikus kormányrendszerbe épített hidraulikus vezérlőszeleppel történik a kormányzás irányítása.
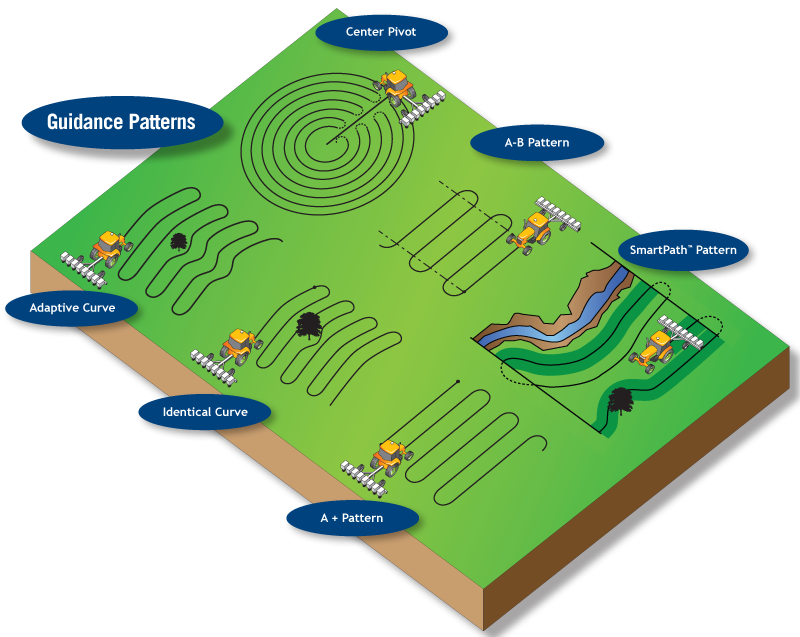
 A robotpilóták egyértelmű előnye a kormányautomatikával szemben, hogy sokkal pontosabb és gyorsabban tudnak reagálni a korrekciós jelekre és ebből adódóan sokkal precízebben is tartják a kijelölt nyomvonalat. Az ilyen berendezések alkalmazását leginkább a 2 cm korrekciós jelpontosságú RTK navigációs rendszerhez ajánlják, mivel az ilyen pontosság mellett lehet igazán kihasználni a robotpilóta-egységek előnyeit. A robotpilóták például a sávművelés (Strip-Till) technológiájának elengedhetetlen eszközei, hiszen az ilyen termesztési rendszerek csak nagypontosságú haladási iránytartással garantálják a költségtakarékosság mellett a helyspecifikus, pontos talajművelést, vetést, tápanyag-visszapótlást.
A robotpilóták egyértelmű előnye a kormányautomatikával szemben, hogy sokkal pontosabb és gyorsabban tudnak reagálni a korrekciós jelekre és ebből adódóan sokkal precízebben is tartják a kijelölt nyomvonalat. Az ilyen berendezések alkalmazását leginkább a 2 cm korrekciós jelpontosságú RTK navigációs rendszerhez ajánlják, mivel az ilyen pontosság mellett lehet igazán kihasználni a robotpilóta-egységek előnyeit. A robotpilóták például a sávművelés (Strip-Till) technológiájának elengedhetetlen eszközei, hiszen az ilyen termesztési rendszerek csak nagypontosságú haladási iránytartással garantálják a költségtakarékosság mellett a helyspecifikus, pontos talajművelést, vetést, tápanyag-visszapótlást.
 A nagy gyártók mai modern erőgépeinek hidrosztatikus kormányrendszerébe már alapkivitelben beépítésre kerül az automatikus kormányzást vezérlő hidraulikus szelep, mely elektromos jelek formájában utasításokat kap a központi elektronikus fedélzeti egységtől, így valósul meg a traktor nyomvonalának tartása. A robotpilóták beépítése az előzetesen gyárilag előkészített erőgépekbe a fedélzeti egység, antenna felszerelésével és a kezelőfelület vezetőfülkébe történő beépítésével valósul meg, majd a beszerelést követően a robotpilóta kalibrálása történik.
A nagy gyártók mai modern erőgépeinek hidrosztatikus kormányrendszerébe már alapkivitelben beépítésre kerül az automatikus kormányzást vezérlő hidraulikus szelep, mely elektromos jelek formájában utasításokat kap a központi elektronikus fedélzeti egységtől, így valósul meg a traktor nyomvonalának tartása. A robotpilóták beépítése az előzetesen gyárilag előkészített erőgépekbe a fedélzeti egység, antenna felszerelésével és a kezelőfelület vezetőfülkébe történő beépítésével valósul meg, majd a beszerelést követően a robotpilóta kalibrálása történik.
 A beépítés és kalibrálás általában 1-2 napot vesz igénybe. Vannak régebbi évjáratú, de már hidraulikus kormányrendszerrel szerelt traktorok is, melyekbe a robotpilóta berendezés ugyancsak alkalmazható, de itt a hidraulikus vezérlőszelepet utólag kell beépíteni az erőgép kormány rendszerébe. Természetesen a mai automata kormányrendszereket már felszerelik dőléskompenzálóval, amely dőlésérzékelők segítségével folyamatosan korrigálja a dőlést, bólintást és a függőleges tengely körüli elfordulást, így pontos, a talajszintre vetített pozícióadatokat szolgáltat.
A beépítés és kalibrálás általában 1-2 napot vesz igénybe. Vannak régebbi évjáratú, de már hidraulikus kormányrendszerrel szerelt traktorok is, melyekbe a robotpilóta berendezés ugyancsak alkalmazható, de itt a hidraulikus vezérlőszelepet utólag kell beépíteni az erőgép kormány rendszerébe. Természetesen a mai automata kormányrendszereket már felszerelik dőléskompenzálóval, amely dőlésérzékelők segítségével folyamatosan korrigálja a dőlést, bólintást és a függőleges tengely körüli elfordulást, így pontos, a talajszintre vetített pozícióadatokat szolgáltat.
 Általában a robotpilóták kezelése igen egyszerű, hiszen kezelőfelülete közel azonos a sorvezetőkével, ezért könnyedén elsajátítjuk a különböző funkciókat. Miután beállítottuk a művelési irányt, elegendő a gépet nagyjából irányba állítani és egy gombnyomással átadni az irányítást a robotpilótának. Napjaink modern robotpilóta-rendszerei már alkalmasak az összes szántóföldi munkában segíteni az irányítást, a rendszer tárolja a táblák adatait, csak elő kell hívni a memóriából. Vannak a piacon olyan robotpilóta-rendszerek, amelyek a traktorok mellett a munkagépeket is képesek kormányozni, irányítani. A passzív munkagépkormányzásnál a munkagépről érkező GPS-adatok alapján korrigálja az erőgép kormányzását a rendszer.
Általában a robotpilóták kezelése igen egyszerű, hiszen kezelőfelülete közel azonos a sorvezetőkével, ezért könnyedén elsajátítjuk a különböző funkciókat. Miután beállítottuk a művelési irányt, elegendő a gépet nagyjából irányba állítani és egy gombnyomással átadni az irányítást a robotpilótának. Napjaink modern robotpilóta-rendszerei már alkalmasak az összes szántóföldi munkában segíteni az irányítást, a rendszer tárolja a táblák adatait, csak elő kell hívni a memóriából. Vannak a piacon olyan robotpilóta-rendszerek, amelyek a traktorok mellett a munkagépeket is képesek kormányozni, irányítani. A passzív munkagépkormányzásnál a munkagépről érkező GPS-adatok alapján korrigálja az erőgép kormányzását a rendszer.
Az aktív munkagép-kormányzás egymástól függetlenül, aktívan kormányozza az erőgépet és a munkagépet, így mind az erőgép, mind a munkagép pontosan a kívánt nyomon halad. Például sorközművelésnél is alkalmazható, ahol a passzív munkagép-kormányzást használó erőgép taposást okozna. A munkagépre ez esetben lényegében egy komplett robotpilóta-rendszer kerül kiépítésre. A tényleges kormányzást farkereke, fartárcsák vagy eltolható felfüggesztés végzi.
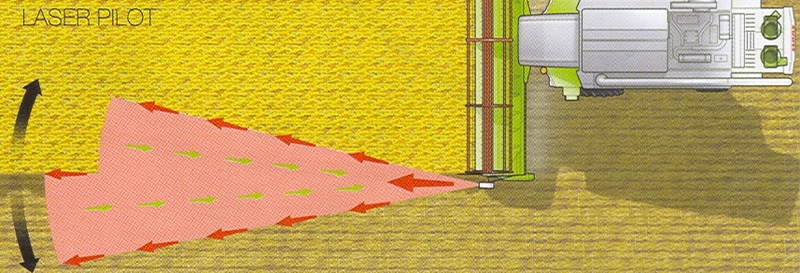
 A kombájnoknál már sok-sok évtizede megjelentek a hidrosztatikus kormányrendszert vezérlő robotpilóták. Ki ne ismerné a tapogató karos soron tartó automatikával szerelt kukorica csőtörő adapterekre, napjainkban pedig már a gabona-vágószerkezetek elektro-optikai érzékelők segítségével érzékelik az álló és a levágott termény határát és ennek megfelelően automatikusan történik meg a kombájn kormányzása, hogy a gépkezelő tehermentesítése mellett, a teljes munkaszélesség mindig optimálisan kihasználásra kerüljön. Az érzékelők a vágóasztalok bal, illetve a jobb oldalra is felszerelhető és vonuláskor behajtható.
A kombájnoknál már sok-sok évtizede megjelentek a hidrosztatikus kormányrendszert vezérlő robotpilóták. Ki ne ismerné a tapogató karos soron tartó automatikával szerelt kukorica csőtörő adapterekre, napjainkban pedig már a gabona-vágószerkezetek elektro-optikai érzékelők segítségével érzékelik az álló és a levágott termény határát és ennek megfelelően automatikusan történik meg a kombájn kormányzása, hogy a gépkezelő tehermentesítése mellett, a teljes munkaszélesség mindig optimálisan kihasználásra kerüljön. Az érzékelők a vágóasztalok bal, illetve a jobb oldalra is felszerelhető és vonuláskor behajtható.
PreGa – Precíziós gazdálkodás és digitális trendek a mezőgazdaságban szakmai konferencia![]()
Március 5-én első alkalommal kerül megrendezésre a PreGa Konferencia, amin a precíziós gazdálkodás és az informatika kiemelt szereplői tartanak gyakorlatorientált előadásokat.
Időpont: 2015. március 5., csütörtök, 9.00 – 17.00 óra
Helyszín: Four Points By Sheraton Kecskemét Hotel & Konferenciaközpont, 6000 Kecskemét, Izsáki út 6.
A konferencia az Agroinform.hu mezőgazdasági portál; az Informatikai, Távközlési és Elektronikai Vállalkozások Szövetsége és az Nemzeti Agrárgazdasági Kamara együttműködésében; valamint az AXIÁL Kft. támogatásával valósul meg.
Jelentkezés és a részletes program: www.prega.hu.
További információk és jelentkezés: +36 20 477 5467










